Наговицын, А. Л. Методы и приемы высокоточной навигации в технологии ГНБ (ННБ)
Методы и приемы высокоточной навигации в технологии ГНБ / ННБ
БУРЕНИЕ ПОД ЖЕЛЕЗОБЕТОННЫМИ ПОКРЫТИЯМИ

Александр Наговицын, генеральный директор ООО «НАГОВИЦЫН ИНЖИНИРИНГ»
Компания «Наговицын инжиниринг» занимается разработкой и производством зондов для широкого круга локационных систем. Параллельно мы пытаемся понять и проанализировать природу пассивных и активных помех, влияющих на точность локационных систем, и разработать приемы и рекомендации, как с ними бороться. Наш интерес не только научный. Зачастую покупатели возвращают нам абсолютно исправные зонды с претензией: «ошибка измерения глубины и положения зонда под землей». Так что же влияет на точность измерений зонда?
Влияние арматуры в железобетонных покрытиях на форму и напряженность магнитного поля зонда
Как показывает практика, наиболее тяжелым и непредсказуемым случаем считается выполнение бурения под железобетонными площадками. Возникает много вопросов, как учитывать экранирование сигнала от зонда при разной толщине железобетона и на разных рабочих частотах (рабочая частота выбирается уже из условий борьбы с активными помехами). При идеальной калибровке глубина по рулетке должна совпадать с показаниями на дисплее локатора. А что происходит при экранировании, то есть при ослаблении сигнала от зонда?
Для проверки влияния арматуры в железобетонном покрытии на сигнал от зонда был изготовлен макет экранированной коробки в виде клетки Фарадея из строительной сетки с размером ячейки 55 х 65 мм (Рисунок 1).
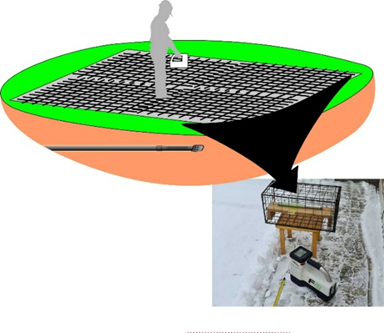
Рис. 1
Такой макет позволяет исключить при необходимости влияние посторонних пассивных помех, то есть обеспечивает чистоту эксперимента. Сторона ячейки клетки примерно в два раза меньше длины антенны в зонде, то есть можно ожидать ослабление сигнала не только из-за потерь в металле, но и за счет короткозамкнутых витков.
В эксперименте использовались локационные системы F2 Falcon и ECLIPSE для наиболее широкого охвата частотного диапазона. На рисунке 2 приведена зависимость ошибки измерения дистанции по показаниям локатора для зонда в клетке (a) (калибровка зонда осуществлена в открытом пространстве на частоте 25 кГц) и наоборот, при калибровке зонда в клетке и измерениям дистанции по показаниям локатора для зонда в свободном пространстве (b)).
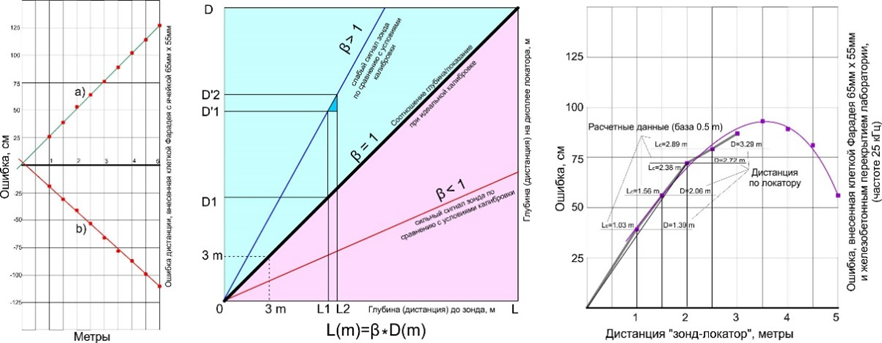
Рис. 2Рис. 3Рис. 4
Здесь наблюдается линейный характер ослабления (или усиления в случае (b)) сигнала зонда, поэтому при нарушении условий калибровки – а произвольное ослабление или усиление сигнала от зонда является нарушением калибровки – уместно использование принципа подобия треугольников для расчета реальной глубины L1 до зонда по крайней мере двум показаниям локатора D'1, D'2 и по измеряемой рулеткой разности ΔL=L2-L1 (рисунок 3). В реальные измерения могут внести ошибки сторонние пассивные помехи в виде, например, межэтажных перекрытий, как показано на рисунке 4 (загиб кривой справа, измерения производились в лабораторных условиях). Тем не менее, расчетные значения истинной дистанции L1 имеют ошибку меньше 5%.
Определение положения и направления буровой головки с зондом под железобетонной площадкой
Помимо расчета глубины существенным моментом является определение направления и положения буровой головки с зондом под бетонной площадкой. Наличие арматуры приводит к существенным искажениям магнитного поля зонда, но только вблизи поверхности площадки. Чем выше располагается локатор над поверхностью, тем меньше искажения поля. На рисунке 5 (слева) показана проекция напряженности магнитного поля зонда в горизонтальной плоскости. Из-за наличия арматуры практически невозможно однозначно «отловить» точки и линию локации/локализации (или сдвоенные стрелки) локационной системой, поэтому использоваться может только принцип навигации по максимуму сигнала.
Для снижения влияния локальных максимумов от ячеек арматуры необходимо как можно выше «отрывать» локатор от поверхности ж/б площадки. Практически хватает полуметрового подъема локатора над ж/б поверхностью, чтобы уверенно определить абсолютный максимум сигнала от зонда, то есть точку для расчета точного значения глубины. И если измерения уровня сигнала провести над площадкой в двух-трех сечениях (как показано на рисунок 5 справа), то достаточно уверенно можно определить и направление зонда под землей. Измерения глубины по дисплею, как уже было указано ранее, производятся в области максимального сигнала от зонда (максимум всегда находится над зондом).
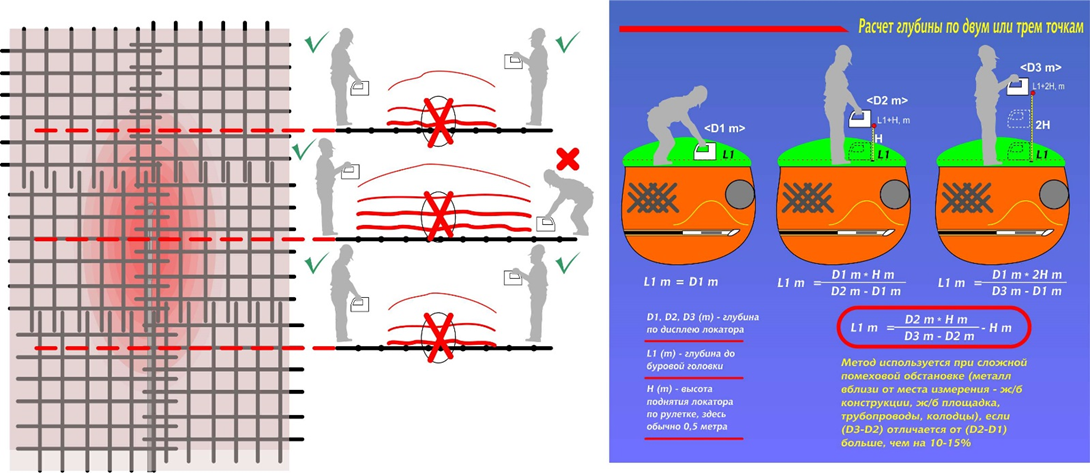
Рис. 5Рис. 6
На рисунке 6 приведены все расчетные формулы для точного определения глубины залегания зонда в буровой головке по двум или трем точкам измерения над площадкой.
Надеюсь, что приведенные пояснения по методам и приемам высокоточной навигации при ГНБ/ННБ в условиях производственных железобетонных площадок уберут все страхи операторов буровых установок и локационных систем, сделают работу более продуктивной, ведь
ВАШИ УСПЕХИ – ЭТО НАША ПРИОРИТЕТНАЯ ЗАДАЧА.
Дополнительную информацию по экспериментальному подтверждению приемов и методов высокоточной навигации в технологии ГНБ/ННБ вы найдете здесь:
Тел. : 8-800-555-1437